arduinom predsa 
Ale nie. To co drzi v rucicke a toci tym, to je nejaky IMU (inertial measurement unit), moze to byt kombinacia akcelerometra, gyra a magnetometra.
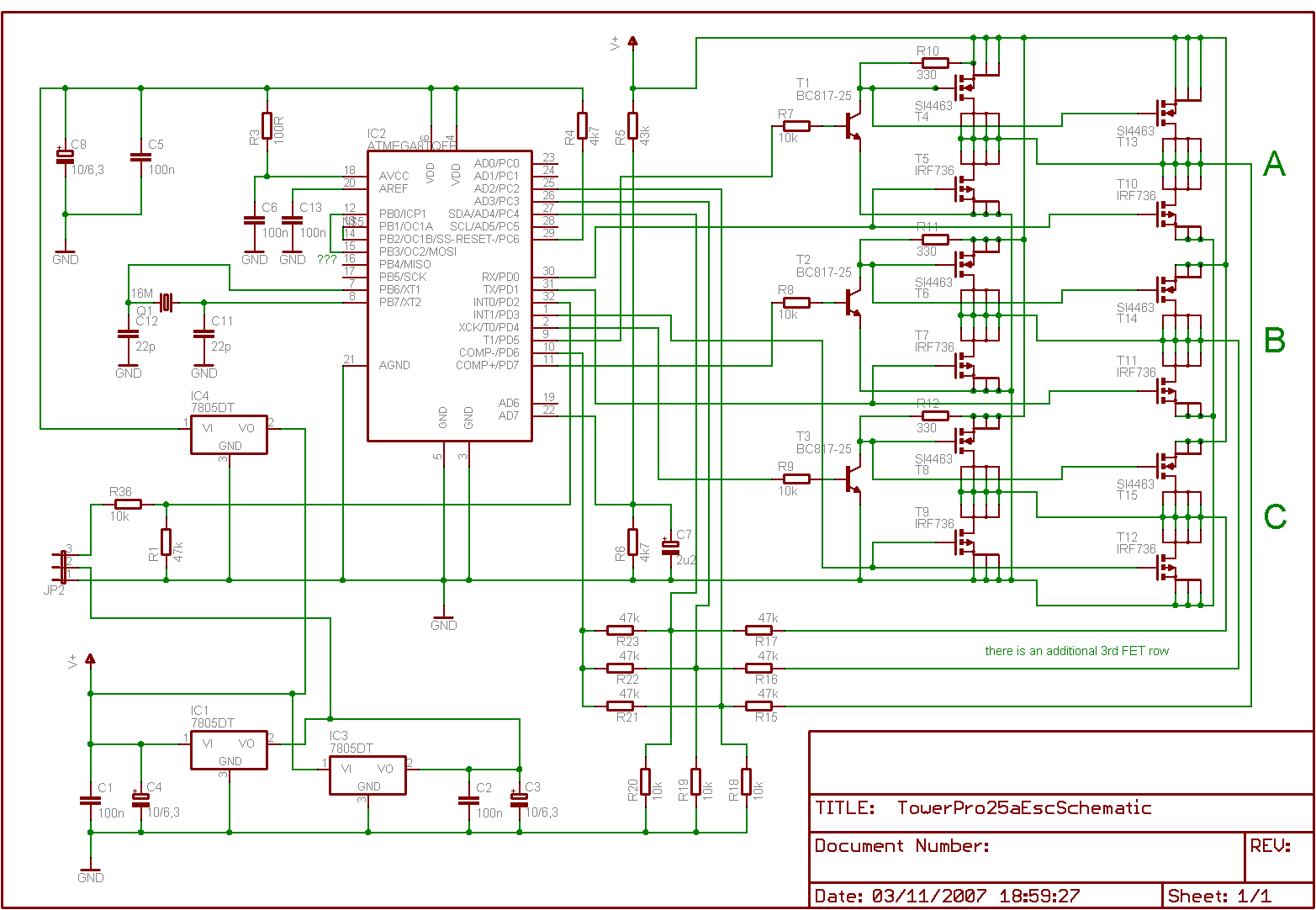
naklon z IMU vyhodnocuje nejaky MCU (napr. arduino ) a riadi cez BLCD driver motor. BLCD driver moze byt specializovany cip na to urceny, alebo si myslim ze moze byt ten driver poskladany z fet tranzistorov. Nejake schemicky takeho drivera z tranzistorov a MCU si mozes vyhladat ked zadas do googla “rc speed controller schematic”, napr: static.rcgroups.net/forums/attachments/4/0/6/0/2/a1555259-161-TowerPro25aEscSchematic.png?d=1194113456. Su to sice “speed controllers”, ale ovladanie motora gimbalu je na rovnakom principe.
Co sa tyka SW, tak ten si skus tiez vyhladat, napr. “arduino gimbal” a pod.
Pripadne ma moze niekto skusenejsi doplnit/opravit.
{kind=link}